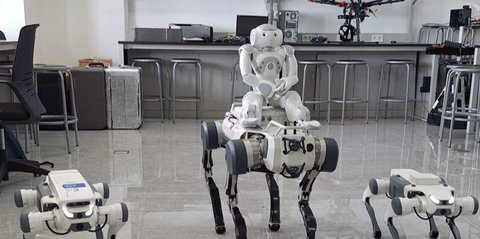
Peneliti China Ciptakan Robot Anjing yang Mampu Menjelajah Asteroid
Inovasi ini dapat mengubah cara meneliti benda-benda angkasa kecil, membuka peluang baru untuk eksplorasi luar angkasa.

Para peneliti di China telah menciptakan robot anjing bertenaga AI yang memiliki kemampuan untuk melompati permukaan asteroid yang kasar dan memiliki gravitasi rendah. Robot ini terinspirasi oleh kemampuan kucing yang bisa berputar dan mendarat dengan kakinya. Dikembangkan oleh tim di Institut Teknologi Harbin, robot ini menggunakan pembelajaran penguatan.
Mengutip dari InterestingEngineering, Rabu (4/12), berbeda dengan robot lain yang menggunakan perangkat keras stabilisasi yang berat, robot ini mengandalkan sistem kontrol "bebas model" untuk mengayunkan keempat kakinya secara terkoordinasi. Desain tersebut akan memungkinkan robot untuk menyesuaikan posturnya di udara, mengoreksi kemiringan, dan bahkan mengubah orientasi agar dapat menghadap arah yang berbeda.
Inovasi ini dapat mengubah cara meneliti benda-benda angkasa kecil, membuka peluang baru untuk eksplorasi luar angkasa, dan meningkatkan pemahaman tentang objek-objek tersebut.
Melompat di situasi gravitasi rendah adalah tantangan besar dalam eksplorasi planet-planet kecil. Planet-planet ini, yang merupakan peninggalan dari pembentukan tata surya, kaya akan sumber daya seperti platinum yang penting untuk penelitian luar angkasa di masa depan. Namun, penjelajah beroda konvensional sering kesulitan mendapatkan traksi di lingkungan dengan gravitasi minimal.
Menurut South China Morning Post (SCMP), para peneliti mengembangkan robot yang dapat menyesuaikan posturnya di udara saat melompat menggunakan pembelajaran penguatan. Berbeda dengan sistem tradisional yang mengandalkan perangkat keras stabilisasi yang berat, robot ini menggunakan sistem kontrol "bebas model" yang memungkinkan gerakan terkoordinasi dari keempat kakinya. Ini memungkinkan robot untuk memperbaiki kemiringannya dan mengarahkan ulang dirinya untuk menyesuaikan lintasannya.
Tim peneliti berfokus pada penyelesaian masalah ketidakseimbangan gaya kaki yang dapat menyebabkan tabrakan, putaran tak terkendali, atau bahkan robot yang terpental dari permukaan. Dengan teknologi suspensi udara, mereka mengembangkan platform simulasi gravitasi mikro untuk menguji teknik kontrol dan memastikan robot dapat mendarat dengan aman, memodifikasi arah lompatan berikutnya, atau mengoreksi penyimpangan ketinggian selama jatuh bebas.
Meskipun badan antariksa telah berhasil mendaratkan pesawat antariksa di asteroid untuk mengambil sampel, belum ada misi yang mengirim penjelajah yang mampu melakukan eksplorasi permukaan jangka panjang.
Menurut SCMP, keberhasilan robot pelompat ini berpotensi mengubah cara menjelajahi asteroid, membuka peluang baru untuk penelitian dan penggunaan sumber daya luar angkasa.
Reporter magang: Nadya Nur Aulia
























:strip_icc():format(webp)/kly-media-production/medias/8261730/original/044268900_1781756195-IMG_3586.jpeg)
:strip_icc():format(webp)/kly-media-production/medias/5574562/original/084743300_1777968071-331fb195-decf-4ad8-9765-83918d262ef7.JPG)
:strip_icc():format(webp)/kly-media-production/medias/8263328/original/010998600_1781883632-40d61759-e5b4-4164-b814-01ba8afee642.jpeg)
:strip_icc():format(webp)/kly-media-production/medias/8263345/original/081855100_1781887842-IMG_20260619_205520.v1.jpg)
:strip_icc():format(webp)/kly-media-production/medias/8263286/original/078037600_1781877229-IMG_4038.jpeg)
:strip_icc():format(webp)/kly-media-production/medias/8263316/original/003749800_1781881522-IMG_4134.jpeg)